Abstract
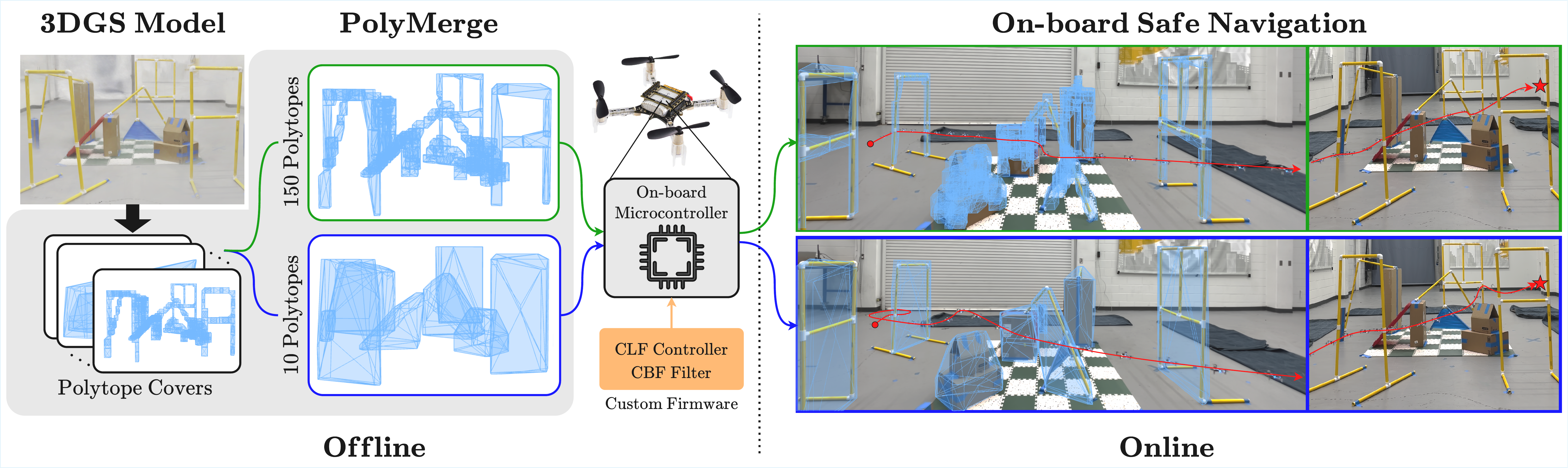
Obstacle avoidance is essential for safe navigation and motion planning. Recent radiance field reconstruction methods enable object detection and modeling with high fidelity, but remain too memory- and compute-intensive for on-board perception-based path planning. To address these limitations, we propose PolyMerge to convert a large, photorealistic 3D Gaussian Splatting (3DGS) model of a scene into a lightweight representation of convex polytopes whose union provably over-approximates all obstacles in the original 3DGS model. PolyMerge tunes the polytope count to trade off conservativeness and compute cost, and integrates with control barrier functions (CBFs) to plan collision-free paths. We showcase PolyMerge in simulation and hardware experiments on a Crazyflie drone, which uses PolyMerge to compute and follow safe trajectories in real time under severe onboard compute resources, outperforming baselines in speed while guaranteeing safety.
BibTeX
@ARTICLE{11513900,
author={Hong, Jihoon and Chiu, Chih-Yuan and Fridovich-Keil, Sara and Chou, Glen},
journal={IEEE Robotics and Automation Letters},
title={PolyMerge: Compressing 3D Gaussian Splats With Polytope Coverings for Provably Safe Resource-Constrained Navigation},
year={2026},
volume={11},
number={7},
pages={8512-8519},
keywords={Modeling;Convex hulls;Drones;Navigation;Ellipsoids;Safety;Hardware;Trajectory;Memory;Merging;Vision-based navigation;collision avoidance;reactive and sensor-based planning},
doi={10.1109/LRA.2026.3692083}}